Comparing Value-Based and Actor-Critic Deep RL
PythonStable-Baselines3PyTorchGymnasiumrliablemarimouv
Bachelor of Science in Computer Systems — University of Limerick, 2025–2026
Mykola Vaskevych
Overview
Three experiments comparing two families of deep reinforcement learning algorithms under identical conditions — same framework, same default hyperparameters, no per-algorithm tuning — so that observed differences reflect genuine algorithmic character rather than configuration effort.
Algorithm families (all discrete action spaces):
- Value-based: DQN, QR-DQN
- Actor-Critic: A2C, PPO, RecurrentPPO
Environments:
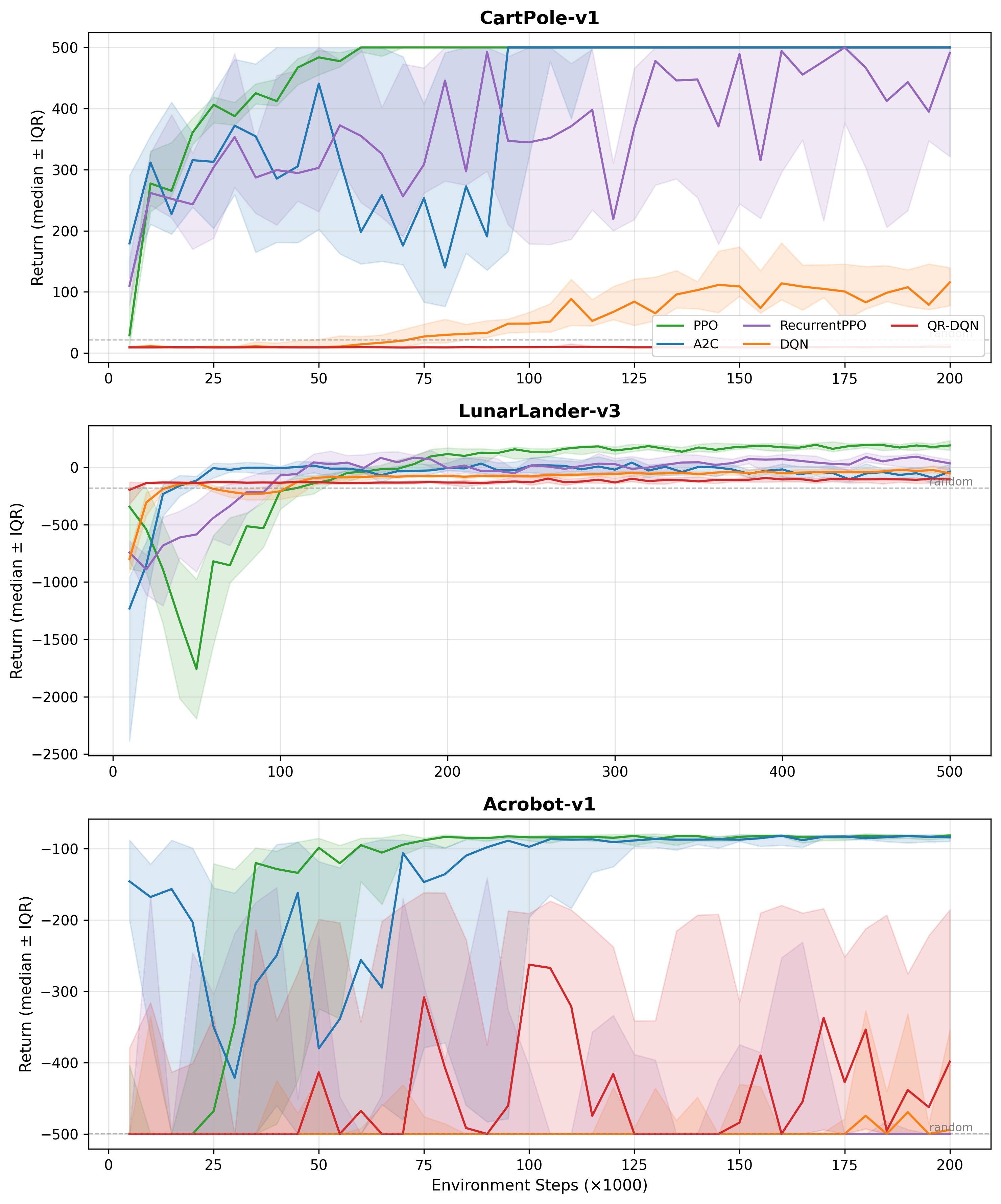
- Experiment 1 — Classic control: CartPole-v1, LunarLander-v3, Acrobot-v1
- Experiment 2 — Atari: Breakout, Pong, Seaquest (10M frames)
- Experiment 3 — Atari extended: same games, longer training budget
Statistical evaluation uses the rliable framework (Agarwal et al., 2021): IQM, bootstrap confidence intervals, performance profiles, optimality gap, and pairwise probability of improvement.
Key Findings
- PPO is the more reliable default — consistent results across all settings, no special setup required
- DQN is not weaker, it’s more demanding — matches or exceeds PPO on specific tasks given sufficient training time
- Metrics can contradict each other: IQM and pairwise P(X>Y), applied to the same data, point in opposite directions — a single aggregate number is insufficient for comparing RL algorithm families
Results
Atari — Learning Curves (DQN vs PPO vs A2C)

Atari — Performance Profile (rliable)
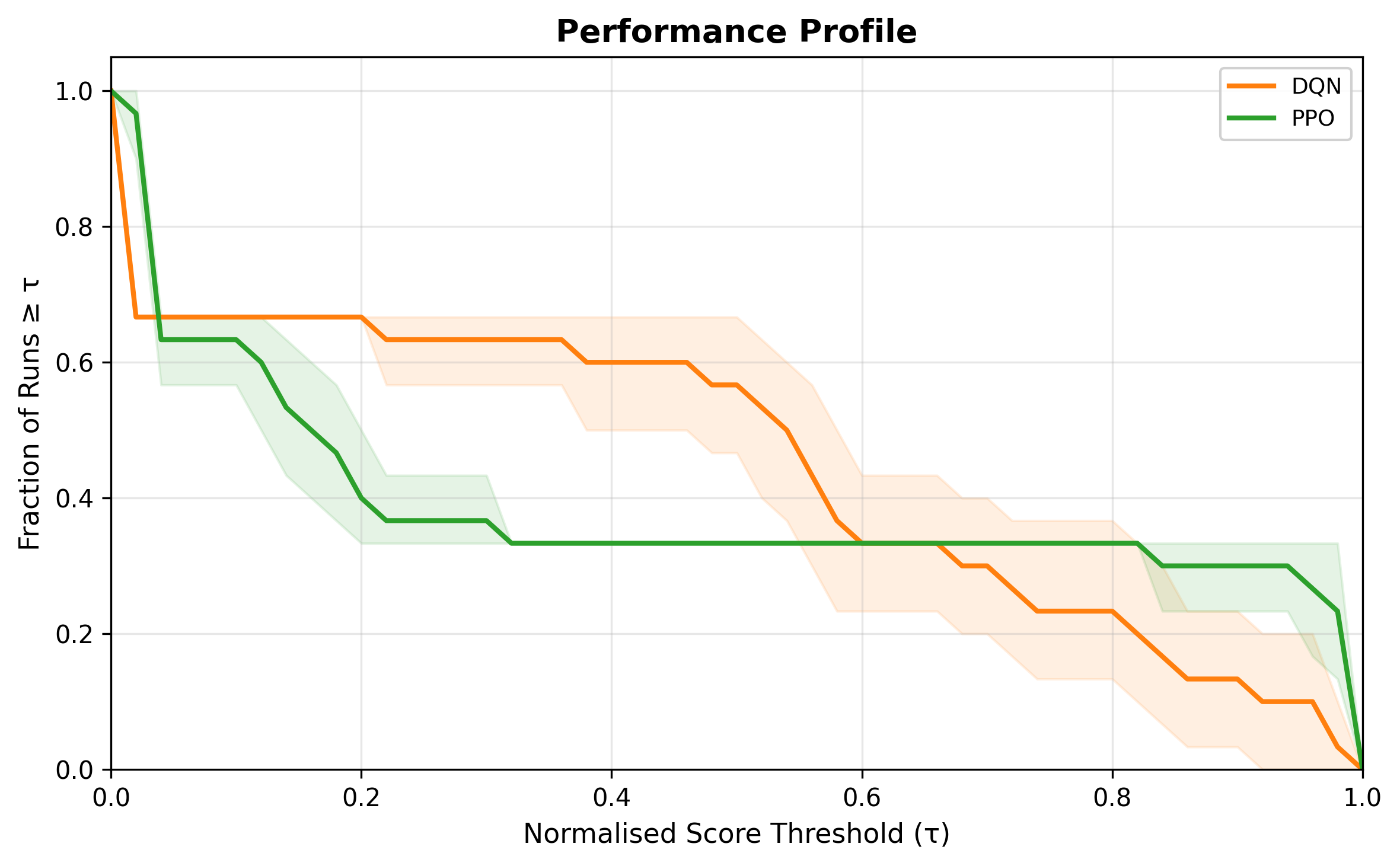
Atari — Optimality Gap

Classic Control — Learning Curves
Repository Structure
fyp/
├── rl_eval_bench/ # Experiment 1: classic control training + rliable evaluation pipeline
├── atari_bench/ # Experiments 2 & 3: Atari training pipeline
├── DQN_ATARY/ # Standalone DQN for Atari Breakout (with demo video)
├── paper_overleaf/ # LaTeX thesis source
└── experiment_3/ # Experiment 3 resultsTech Stack
Python · Stable-Baselines3 · sb3-contrib · Gymnasium · rliable · PyTorch · marimo · uv
Related Repos
- DQN_ATARY — standalone DQN with Atari Breakout demo video
- paper_overleaf — full thesis PDF
Run
uv sync
# Classic control: train all envs, evaluate, open report
cd rl_eval_bench
bash run.sh ppo # or a2c, dqn, qrdqn, rppo
# DQN Breakout demo
cd DQN_ATARY
uv sync
uv run marimo edit notebook/CS4287-Assignment-2-Deep-Reinforcment-Learning.py